Microcontroladores 10
LAB 10 - PWM con PIC (Modulación por ancho de pulso)
CURSO DE PROGRAMACIÓN DE MICROCONTROLADORES PIC
PARTE A: Programación de Microcontroladores PIC de MICROCHIP.
1.CAPACIDAD TERMINAL
- Utilizar al microcontrolador en aplicaciones de control electrónico.
- Desarrollar y ejecutar programas en un microcontrolador PIC
- Programar y configurar interfaces básicas del microcontrolador.
2.COMPETENCIA ESPECIFICA DE LA SESION
- Conocer el funcionamiento y la configuración del módulo PWM
- Aplicar estos conocimientos para el control de velocidad de un motor.
Para poder generar esta señal con nuestro PIC, se hace uso de los módulos CCP (Comparador, Captura y PWM). Dicho módulo permite realizar tres funciones básicas.
Comparar: Compara el valor del temporizador con el valor de un registro y provoca una acción en el PIC.
Captura: Obtiene el valor del temporizador en un momento dado, fijado por la acción de un terminal del PIC.
PWM: Genera una señal modulada por ancho de pulso.
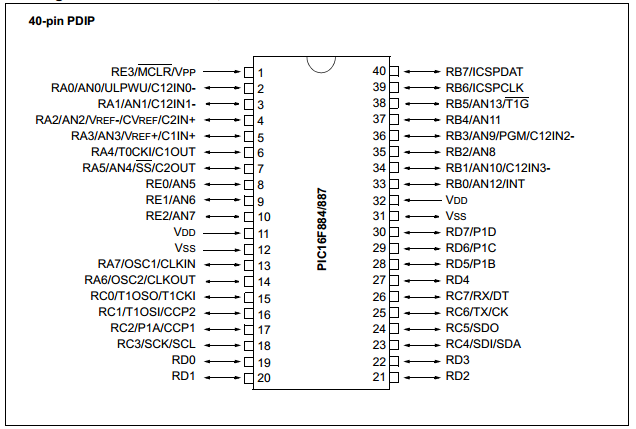
En esta entrada, nos vamos a centrar en esta ultima, en el PWM. Para nuestro caso en especifico, como estamos usando el PIC16F887, dicho microcontrolador tiene 2 modulos CCP como se puede apreciar en la siguiente figura, los cuales corresponden a los PINES 16 y 17 (Correspondientes al puerto C, RC1 y RC2).



- Podemos cambiar el tipo de motor para que nos muestre las revoluciones que tiene .
- Podemos cambiar algunos parámetros del osciloscopio para apreciar mejor la señal
- Al momento de crear el project wizard nos viene una librería con el nombre que le pusimos con parámetros del codigo.
- Utilizamos al microcontrolador en aplicaciones de control electrónico.
- Desarrollamos y ejecutar programas en un microcontrolador PIC
- Programamos y configurar interfaces básicas del microcontrolador.
- Logramos configurar un codigo creandolo desde el aspecto de Project wizar donde escogimos el tipo de Pic , la familia y mas
- Logramos ver la temperatura en la pantalla LCD variando el potenciometro y viendo su RPM en el motor
- Pudimos usar nombres de librerias dadas para introducir codigos dentro de estas , se suele usar cuando el codigo a programar es extenso.


Comentarios
Publicar un comentario